陈浩耀教授团队在机器人运动规划领域取得重要进展,成果发文机器人领域国际顶刊
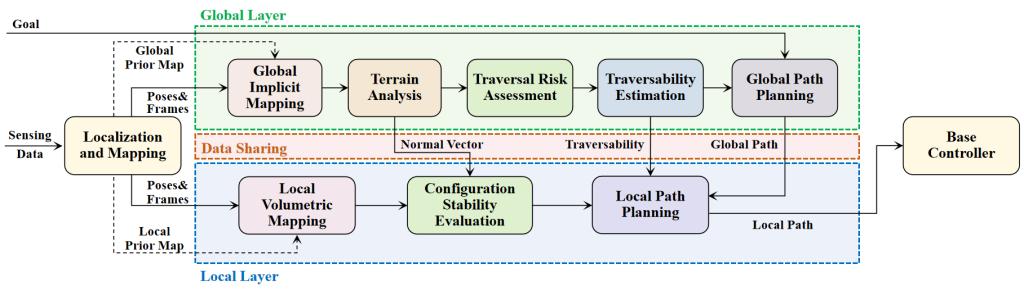
近日,哈工大深圳校区智能学部智能科学与工程学院陈浩耀教授团队在机器人路径规划方面取得重要进展,相关研究成果以《Real-Time Multi-Level Terrain-Aware Path Planning for Ground Mobile Robots in Large-Scale Rough Terrains 》为题发表在机器人领域国际顶级期刊《IEEE Transactions on Robotics》(TRO)。该研究通过引入地形分析与构型稳定性估计形成层次化路径规划框架,实现了地面移动机器人在崎岖地形下的安全、稳定、高效的自主导航。